



新闻中心





桁架机械手是一种建立在直角X,Y,Z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
功能配置
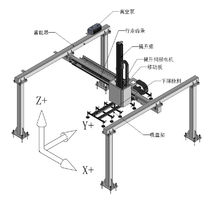
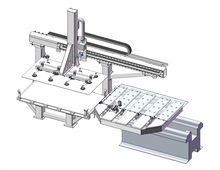
机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。
其中:
1,结构框架,主要由立柱等结构件组成,其作用是将各轴架空至一定高度,多由铝型材或方管,矩形管,圆管等焊接件构成;
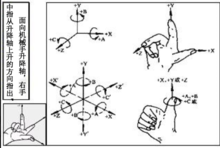
2,X轴组件、Y轴组件、Z轴组件,三个运动组件为桁架机械手的核心组件,其定义规则遵循笛卡尔坐标系 。
各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。
1),结构件通常由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是机械手负载的主要承担者。
2),导向件,常用有直线导轨,v型滚轮导轨,U型滚轮导轨,方型导轨以及燕尾槽等常用导向结构,其具体运用需根据实际使用工况以及定位精度决定。
3),传动件,通常有电动,气动,液压三种类型,其中电动有齿轮齿条结构,滚珠丝杠结构,同步带传动,链条传统以及钢丝绳传动等。
4),传感器检测元件,通常两端采用行程开关作为电限位,当移动组件移动至两端限位开关处时,需要对机构进行锁死,防止其超程;此外还有原点传感器以及位置反馈传感器。
5),机械限位组,其作用是在电限位行程之外的刚性限位,俗称死限位。
3,工装夹具,根据工件形状大小材质等有不同形式,如:真空吸盘吸取,卡盘夹取,托取或针式夹具插取等形式。
4,控制柜,其相当于与桁架机械手的大脑作用,通过工业控制器,采集各传感器或按钮的输入信号,来发送指令给个执行元件按既定动作去执行。
产品特色
其特点:
1,高效--------其各轴以极高的速度直线运行,可用伺服电机快速响应;
2,稳定-------极小的重复性误差,最高可达0.05mm;
3,高强度------7x24小时工作,不需要吃饭、睡觉、抽烟等;
4,高精度------定位精度可达0.02mm(基于制作成本原因,可根据使用工况适当放大定位精度);
5,性价比高------相比关节机器人,其负载重量大,制作成本低,适合于“中国智造”基本国情;
6,操作简单------基于直角坐标体系,其运动参数较为简单。
发展历史
机械手首先是从美国开始研制的,其在国外有较完善的运用。
1958年美国联合控制公司研制出第一台机械手。
它的结构是:机体上安装一个回转长臂,顶部装有电磁块的工件抓放机构,控制系统是示教形的。
1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。商名为Unimate(即万能自动)。运动系统仿照坦克炮塔,臂可以回转、俯仰、伸缩、用液压驱动;控制系统用磁鼓作为存储装置。不少球坐标通用机械手就是在这个基础上发展起来的。同年,美国机械制造公司也实验成功一种叫Vewrsatran机械手。该机械手的中央立柱可以回转、升降采用液压驱动控制系统也是示教再现型。这两种出现在六十年代初的机械手,是后来国外工业机械手发展的基础。
1978年美国Unimate公司和斯坦福大学,麻省理工学院联合研制一种 Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。联邦德国KnKa公司还生产一种点焊机械手,采用关节式结构和程序控制。
桁架机器人特性说明:
■伺服驱动,加减速精准顺畅
■多种速率切换,取放顺畅,减低机械损耗。
■教导操作适应车削复杂工作状态。
■可多点停放,进行多样化的周边生产变化。
■强大的IO扩展性,轻松应对多台联机生产。
■横梁机构扎实,固定脚架美观大方,轻松实现NC车床速配。
■可靠的达成24小时苛刻生产的要求。
■机械手专用控制器,具备高速定位防抖功能。
■增加安全保护模块,实现安全生产。
■三轴机械手具有料盘堆叠,码垛功能。
桁架机器人参数表:

来源:
上一篇:
三轴直线系列桁架机器人
下一篇:
已经没有了
-
在线留言
ONLINE MESSAGE
在线留言





-
相关资讯
- 单梁起重机的优势有哪些 2016-05-12
- 起重机主要部位日常维护保养 2016-05-27
- 苏州欧式单梁桥式起重机厂家 2019-04-03
- 细述桁架机械手的功能配置及产品特色 2021-07-12
- 桁架机械手是如何上下料 2021-07-14
- 上下料桁架机械手优势分析 2021-07-16
- 桁架机械手控制系统 2021-08-03
- 欧式起重机为什么广受欢迎呢 2023-02-06






